1. სხვადასხვა სტრუქტურული პრინციპები
ორი მოდელის დიზაინის პრინციპები განსხვავებულია, რის შედეგადაც განსხვავებული სტრუქტურებია მოსახვევი სლაიდერის ორივე მხარეს სინქრონიზაციის უზრუნველსაყოფად. ბრუნვის ღერძის მოსახვევი მანქანა იყენებს ბრუნვის ღერძს მარცხენა და მარჯვენა საქანელების ღეროების დასაკავშირებლად, რათა ჩამოყალიბდეს ბრუნვის ღერძი, რომელიც აიძულებს სინქრონიზაციის მექანიზმს გადაადგილდეს ცილინდრებში ორივე მხრიდან, ასე რომ, ბრუნვის ღერძის სინქრონიზაციის მოსახვევი მანქანა არის მექანიკური იძულებითი სინქრონიზაციის მეთოდი. , და სლაიდერის პარალელურობა ავტომატურად ვერ შემოწმდება ავტომატური შუამავლობით.
ელექტროჰიდრავლიკური სინქრონული მოსახვევი მანქანა არის მაგნიტური (ოპტიკური) სასწორის დაყენება სლაიდერზე და კედლის ფირფიტაზე. რიცხვითი კონტროლის სისტემას შეუძლია ნებისმიერ დროს გააანალიზოს სლაიდერის ორივე მხარის სინქრონიზაცია მაგნიტური (ოპტიკური) მასშტაბის უკუკავშირის ინფორმაციის საშუალებით. თუ არის შეცდომა, რიცხვითი კონტროლის სისტემა დარეგულირდება პროპორციული ელექტროჰიდრავლიკური სერვო სარქველით, რათა მოახდინოს ინსულტის სინქრონიზაცია სლაიდერის ორივე მხარეს. რიცხვითი კონტროლის სისტემა, ჰიდრავლიკური საკონტროლო სარქველების ჯგუფი და მაგნიტური მასშტაბი წარმოადგენს ელექტროჰიდრავლიკური სინქრონული მოსახვევი მანქანის უკუკავშირის დახურულ მარყუჟის კონტროლს.

2. სიზუსტე
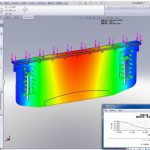
სლაიდერის პარალელიზმი განსაზღვრავს სამუშაო ნაწილის კუთხეს. ბრუნვის ღერძის სინქრონული მოსახვევი მანქანა მექანიკურად ინარჩუნებს სლაიდერის სინქრონიზაციას რეალურ დროში შეცდომის გამოხმაურების გარეშე და თავად მანქანას არ შეუძლია ავტომატური კორექტირება. გარდა ამისა, მისი ნაწილობრივი დატვირთვის ტევადობა დაბალია (ბრუნვის ღერძის სინქრონული მოსახვევი მანქანა იყენებს ბრუნვის ღერძს, რათა აიძულოს სინქრონიზაციის მექანიზმი ცილინდრები ორივე მხრიდან მაღლა და ქვევით გადაადგილდეს. თუ გრძელვადიანი ნაწილობრივი დატვირთვა გამოიწვევს ბრუნვის ღერძის დეფორმაციას. .), ელექტროჰიდრავლიკური სინქრონული მოსახვევი მანქანა არის სისტემა პროპორციული ელექტრო. თხევადი სარქველების ჯგუფი აკონტროლებს სლაიდერის სინქრონიზაციას, ხოლო მაგნიტური (ოპტიკური) მასშტაბი უზრუნველყოფს რეალურ დროში შეცდომის გამოხმაურებას. თუ არის შეცდომა, სისტემა დარეგულირდება პროპორციული სარქვლის მეშვეობით, რათა შეინარჩუნოს სლაიდერის სინქრონიზაცია.
3. სიჩქარე
მანქანის მუშაობაში არის ორი წერტილი, რომელიც განსაზღვრავს მის სიჩქარეს: (1) სლაიდერის სიჩქარე, (2) სარეზერვო სიჩქარე, (3) დახრის ნაბიჯი.
ბრუნვის ღერძის სინქრონული მოსახვევი მანქანა იყენებს 6:1 ან 8:1 ცილინდრს, რომელიც ნელია, ხოლო ელექტროჰიდრავლიკური სინქრონული მოსახვევი მანქანა იყენებს 13:1 ან 15:1 ცილინდრს, რომელიც არის სწრაფი. ამრიგად, ელექტროჰიდრავლიკური სინქრონული მოსახვევი მანქანის სწრაფი დაცემის და დაბრუნების სიჩქარე გაცილებით მაღალია, ვიდრე ბრუნვის სინქრონული მოსახვევი მანქანა.
როდესაც ბრუნვის ღერძის სინქრონული მოსახვევი მანქანის სლაიდერი მოძრაობს ქვევით, თუმცა სიჩქარეს აქვს სწრაფი დაწევისა და შენელების ფუნქციები, სწრაფი დაბრუნებისა და დაბრუნების სიჩქარე მხოლოდ 80 მმ/წმ-ია, ხოლო სწრაფი და ნელი გადართვა არ არის გლუვი. სარეზერვო სიჩქარის სიჩქარე მხოლოდ 100 მმ/წმ-ია.
თუ სამუშაო ნაწილის რამდენიმე საფეხურზე მოხრილი საჭიროებაა, ბრუნვის ღერძის სინქრონული ღუნვის აპარატის თითოეული პროცესი ცალკე უნდა იყოს დაყენებული და დამუშავების პროცესი ძალიან რთულია. ამასთან, ელექტროჰიდრავლიკურ სინქრონულ მანქანას შეუძლია დააყენოს და შეინახოს თითოეული ნაბიჯის პროცესი კომპიუტერის საშუალებით და შეიძლება უწყვეტად იმოქმედოს, რაც მნიშვნელოვნად აუმჯობესებს მოსახვევის ნაბიჯის სიჩქარეს და აუმჯობესებს მუშაობის ეფექტურობას.
როდესაც ელექტროჰიდრავლიკური სინქრონული მოსახვევი მანქანის სლაიდერი ეშვება, სიჩქარეს აქვს სწრაფი დაწევისა და შენელების ფუნქციები. სწრაფი დაბრუნებისა და დაბრუნების სიჩქარემ შეიძლება მიაღწიოს 200 მმ/წმ-ს, ხოლო სწრაფი და ნელი კონვერტაცია გლუვია, რამაც შეიძლება მნიშვნელოვნად გააუმჯობესოს წარმოების ეფექტურობა. ამავდროულად, სარეზერვო სიჩქარის სიჩქარე აღწევს 300 მმ/წმ.
4. ძალა
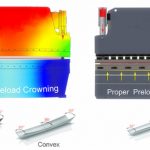
საკუთარი დიზაინის გამო, ტორსიონული სინქრონული ღუნვის მანქანა არ შეიძლება იხრება ექსცენტრიული დატვირთვის ქვეშ. თუ იგი დიდი ხნის განმავლობაში მოხრილია ექსცენტრიული დატვირთვის ქვეშ, ეს გამოიწვევს ბრუნვის ლილვის დეფორმაციას. ელექტროჰიდრავლიკურ სინქრონულ CNC მოსახვევ მანქანას ასეთი პრობლემა არ აქვს. მარცხენა და მარჯვენა მხარეს Y1 და Y2 ღერძები დამოუკიდებლად მოქმედებენ, ამიტომ ნაწილობრივი დატვირთვისას შესაძლებელია მისი მოხრილობა. ელექტროჰიდრავლიკური სინქრონული ღუნვის აპარატის მუშაობის ეფექტურობა შეიძლება იყოს ორი-სამი ბრუნვის ღერძის სინქრონული ღუნვის აპარატის ექვივალენტური.
მსგავსი პროდუქტები
 CNC პრესის სამუხრუჭე აპარატის მუშაობის პრინციპი და შემადგენლობა
CNC პრესის სამუხრუჭე აპარატის მუშაობის პრინციპი და შემადგენლობა- რატომ დაამატეთ კომპენსაციის სისტემა პრესის სამუხრუჭე მოსახვევ მანქანას
- Press Brake CNC სისტემების შედარება და შერჩევა
- 4 ნაბიჯი იმისათვის, რომ იცოდეთ CNC ფურცლის ლითონის ბენდერის E21 სისტემა
- როგორ გავაკეთოთ გადახრის კომპენსაცია CNC ფურცლის ლითონის ბედერისთვის
- საუკეთესო გაყიდვადი ჰიდრავლიკური წნევის ჰიდრავლიკური საამქრო პრესის ჰიდრავლიკური ტონა ჰიდრავლიკური
- ჩინეთის 40 ტონიანი პრეს სამუხრუჭე
- ჰიდრავლიკური დენის პრესის აპარატის უსაფრთხო მუშაობის წესები
- WILA საშუალო და სქელი ფირფიტების მოსახვევის ეფექტური ხსნარი
- საერთო მექანიკური გაუმართაობა და პრესის სამუხრუჭე მოსახვევი მანქანების შენარჩუნება